13.9. Anlamsal Bölümleme ve Veri Kümesi¶ Open the notebook in SageMaker Studio Lab
Section 13.3—Section 13.8 içinde nesne algılama görevleri tartışılırken, imgelerdeki nesneleri etiketlemek ve tahmin etmek için dikdörtgen kuşatan kutular kullanıldı. Bu bölümde, bir imgenin farklı anlamsal sınıflara ait bölgelere nasıl bölüneceğine odaklanan anlamsal bölümleme sorununu tartışacaktır. Nesne algılamasından farklı olarak, anlamsal bölümleme piksel düzeyinde imgelerde ne olduğunu tanır ve anlar: Anlamsal bölgelerin etiketlenmesi ve tahmini piksel düzeydedir. Fig. 13.9.1, anlamsal bölümlemede imgenin köpek, kedi ve arkaplanının etiketlerini gösterir. Nesne algılama ile karşılaştırıldığında, anlamsal bölümlemede etiketlenmiş piksel düzeyinde sınırlar açıkça daha ince tanelidir.

Fig. 13.9.1 Anlamsal bölümlemede köpek, kedi ve görüntünün arka planının etiketleri.¶
13.9.1. İmge Bölümleme ve Örnek Bölümleme¶
Bilgisayarla görme alanında anlamsal bölümlemeye benzer iki önemli görev vardır, yani imge bölümleme ve örnek bölümleme. Onları anlamsal bölümlemeden kısaca aşağıdaki gibi ayırt edeceğiz.
İmge bölümleme bir imgeyi birkaç kurucu bölgeye böler. Bu tür bir soruna yönelik yöntemler genellikle imgedeki pikseller arasındaki korelasyonu kullanır. Eğitim sırasında imge pikselleri hakkında etiket bilgisine ihtiyaç duymaz ve bölümlere ayrılmış bölgelerin tahmin sırasında elde etmeyi umduğumuz anlamsal bilgilere sahip olacağını garanti edemez. Fig. 13.9.1 içindeki imgeyi girdi olarak alarak, imge bölümleme köpeği iki bölgeye bölebilir: Biri ağırlıklı olarak siyah olan ağız ve gözleri kaplar, diğeri ise esas olarak sarı olan vücudun geri kalanını kaplar.
Örnek bölümleme aynı zamanda eşzamanlı algılama ve bölümleme olarak da adlandırılır. İmgedeki her nesne örneğinin piksel düzeyinde bölgelerinin nasıl tanınacağını inceler. Anlamsal bölümlemeden farklı olarak, örnek bölümlemenin yalnızca anlamı değil, aynı zamanda farklı nesne örneklerini de ayırt etmesi gerekir. Örneğin, görüntüde iki köpek varsa, örnek bölümlemenin bir pikselin iki köpekten hangisine ait olduğunu ayırt etmesi gerekir.
13.9.2. Pascal VOC2012 Anlamsal Bölümleme Veri Kümesi¶
En önemli anlamsal bölümleme veri kümesi Pascal VOC2012’dir. Aşağıda, bu veri kümesine bir göz atacağız.
%matplotlib inline
import os
from d2l import mxnet as d2l
from mxnet import gluon, image, np, npx
npx.set_np()
%matplotlib inline
import os
import torch
import torchvision
from d2l import torch as d2l
Veri kümesinin tar dosyası yaklaşık 2 GB’dir, bu nedenle dosyayı
indirmek biraz zaman alabilir. Ayıklanan veri kümesi
../data/VOCdevkit/VOC2012 adresindedir.
#@save
d2l.DATA_HUB['voc2012'] = (d2l.DATA_URL + 'VOCtrainval_11-May-2012.tar',
'4e443f8a2eca6b1dac8a6c57641b67dd40621a49')
voc_dir = d2l.download_extract('voc2012', 'VOCdevkit/VOC2012')
#@save
d2l.DATA_HUB['voc2012'] = (d2l.DATA_URL + 'VOCtrainval_11-May-2012.tar',
'4e443f8a2eca6b1dac8a6c57641b67dd40621a49')
voc_dir = d2l.download_extract('voc2012', 'VOCdevkit/VOC2012')
../data/VOCdevkit/VOC2012’a girdikten sonra, veri kümesinin farklı
bileşenlerini görebiliriz. ImageSets/Segmentation adresi, eğitim ve
test örneklerini belirten metin dosyaları içerirken, JPEGImages ve
SegmentationClass adresleri sırasıyla her örnek için girdi imgesini
ve etiketini depolar. Buradaki etiket aynı zamanda etiketlenmiş girdi
imgesiyle aynı boyutta imge biçimindedir. Ayrıca, herhangi bir etiket
imgesinde aynı renge sahip pikseller aynı anlamsal sınıfa aittir.
Aşağıda, read_voc_images işlevi tüm girdi imgelerini ve etiketlerini
belleğe okumak için tanımlanır.
#@save
def read_voc_images(voc_dir, is_train=True):
"""Tüm VOC özniteliklerini okuyun ve resimleri etiketleyin."""
txt_fname = os.path.join(voc_dir, 'ImageSets', 'Segmentation',
'train.txt' if is_train else 'val.txt')
with open(txt_fname, 'r') as f:
images = f.read().split()
features, labels = [], []
for i, fname in enumerate(images):
features.append(image.imread(os.path.join(
voc_dir, 'JPEGImages', f'{fname}.jpg')))
labels.append(image.imread(os.path.join(
voc_dir, 'SegmentationClass', f'{fname}.png')))
return features, labels
train_features, train_labels = read_voc_images(voc_dir, True)
#@save
def read_voc_images(voc_dir, is_train=True):
"""Tüm VOC özniteliklerini okuyun ve resimleri etiketleyin."""
txt_fname = os.path.join(voc_dir, 'ImageSets', 'Segmentation',
'train.txt' if is_train else 'val.txt')
mode = torchvision.io.image.ImageReadMode.RGB
with open(txt_fname, 'r') as f:
images = f.read().split()
features, labels = [], []
for i, fname in enumerate(images):
features.append(torchvision.io.read_image(os.path.join(
voc_dir, 'JPEGImages', f'{fname}.jpg')))
labels.append(torchvision.io.read_image(os.path.join(
voc_dir, 'SegmentationClass' ,f'{fname}.png'), mode))
return features, labels
train_features, train_labels = read_voc_images(voc_dir, True)
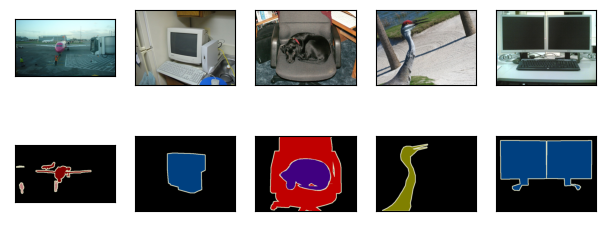
İlk beş girdi imgesini ve etiketlerini çizdiriyoruz. Etiket imgelerinde, beyaz ve siyah sırasıyla kenarlıkları ve arkaplanı temsil ederken, diğer renkler farklı sınıflara karşılık gelir.
n = 5
imgs = train_features[0:n] + train_labels[0:n]
d2l.show_images(imgs, 2, n);
n = 5
imgs = train_features[0:n] + train_labels[0:n]
imgs = [img.permute(1,2,0) for img in imgs]
d2l.show_images(imgs, 2, n);
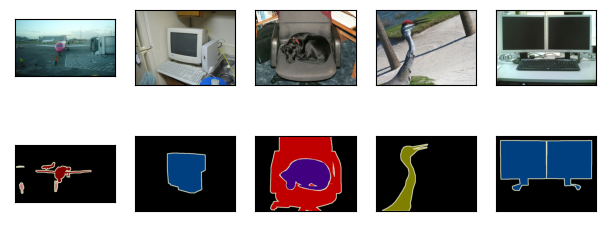
Ardından, bu veri kümesindeki tüm etiketler için RGB renk değerlerini ve sınıf adları numaralandırırız.
#@save
VOC_COLORMAP = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0],
[0, 0, 128], [128, 0, 128], [0, 128, 128], [128, 128, 128],
[64, 0, 0], [192, 0, 0], [64, 128, 0], [192, 128, 0],
[64, 0, 128], [192, 0, 128], [64, 128, 128], [192, 128, 128],
[0, 64, 0], [128, 64, 0], [0, 192, 0], [128, 192, 0],
[0, 64, 128]]
#@save
VOC_CLASSES = ['background', 'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair', 'cow',
'diningtable', 'dog', 'horse', 'motorbike', 'person',
'potted plant', 'sheep', 'sofa', 'train', 'tv/monitor']
#@save
VOC_COLORMAP = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0],
[0, 0, 128], [128, 0, 128], [0, 128, 128], [128, 128, 128],
[64, 0, 0], [192, 0, 0], [64, 128, 0], [192, 128, 0],
[64, 0, 128], [192, 0, 128], [64, 128, 128], [192, 128, 128],
[0, 64, 0], [128, 64, 0], [0, 192, 0], [128, 192, 0],
[0, 64, 128]]
#@save
VOC_CLASSES = ['background', 'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair', 'cow',
'diningtable', 'dog', 'horse', 'motorbike', 'person',
'potted plant', 'sheep', 'sofa', 'train', 'tv/monitor']
Yukarıda tanımlanan iki sabit ile etiketteki her piksel için sınıf
dizinini bulabiliriz. Yukarıdaki RGB renk değerlerinden sınıf
dizinlerine eşleştirmeyi oluşturmak için voc_colormap2label işlevini
ve bu Pascal VOC2012 veri kümesindeki herhangi bir RGB değerlerini sınıf
dizinleriyle eşlemek için voc_label_indices işlevini tanımlıyoruz.
#@save
def voc_colormap2label():
"""VOC etiketleri için RGB'den sınıf dizinlerine eşleme oluşturun."""
colormap2label = np.zeros(256 ** 3)
for i, colormap in enumerate(VOC_COLORMAP):
colormap2label[
(colormap[0] * 256 + colormap[1]) * 256 + colormap[2]] = i
return colormap2label
#@save
def voc_label_indices(colormap, colormap2label):
"""VOC etiketlerindeki tüm RGB değerlerini sınıf dizinleriyle eşleyin."""
colormap = colormap.astype(np.int32)
idx = ((colormap[:, :, 0] * 256 + colormap[:, :, 1]) * 256
+ colormap[:, :, 2])
return colormap2label[idx]
#@save
def voc_colormap2label():
"""VOC etiketleri için RGB'den sınıf dizinlerine eşleme oluşturun."""
colormap2label = torch.zeros(256 ** 3, dtype=torch.long)
for i, colormap in enumerate(VOC_COLORMAP):
colormap2label[
(colormap[0] * 256 + colormap[1]) * 256 + colormap[2]] = i
return colormap2label
#@save
def voc_label_indices(colormap, colormap2label):
"""VOC etiketlerindeki tüm RGB değerlerini sınıf dizinleriyle eşleyin."""
colormap = colormap.permute(1, 2, 0).numpy().astype('int32')
idx = ((colormap[:, :, 0] * 256 + colormap[:, :, 1]) * 256
+ colormap[:, :, 2])
return colormap2label[idx]
Örneğin, ilk örnek imgede, uçağın ön kısmının sınıf indeksi 1 iken arka plan indeksi 0 olur.
y = voc_label_indices(train_labels[0], voc_colormap2label())
y[105:115, 130:140], VOC_CLASSES[1]
(array([[0., 0., 0., 0., 0., 0., 0., 0., 0., 1.],
[0., 0., 0., 0., 0., 0., 0., 1., 1., 1.],
[0., 0., 0., 0., 0., 0., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 1., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 1., 1., 1., 1., 1.],
[0., 0., 0., 0., 1., 1., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 1., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 1., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 0., 1., 1., 1., 1.],
[0., 0., 0., 0., 0., 0., 0., 0., 1., 1.]]),
'aeroplane')
y = voc_label_indices(train_labels[0], voc_colormap2label())
y[105:115, 130:140], VOC_CLASSES[1]
(tensor([[0, 0, 0, 0, 0, 0, 0, 0, 0, 1],
[0, 0, 0, 0, 0, 0, 0, 1, 1, 1],
[0, 0, 0, 0, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 1, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 1, 1, 1, 1, 1],
[0, 0, 0, 0, 1, 1, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 1, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 1, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 0, 1, 1, 1, 1],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 1]]),
'aeroplane')
13.9.2.1. Veri Ön İşleme¶
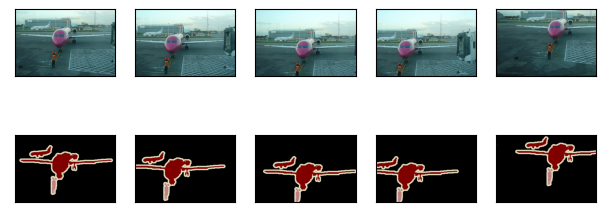
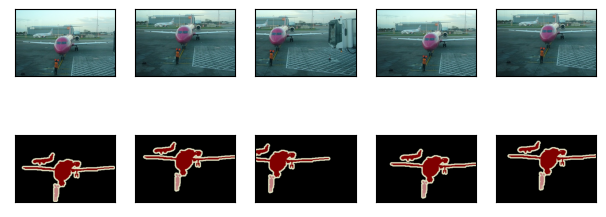
Section 7.1—-Section 7.4 içinde olduğu gibi önceki deneylerde imgeler modelin gerekli girdi şekline uyacak şekilde yeniden ölçeklendirildi. Ancak, anlamsal bölümlemede, bunun yapılması, tahmin edilen piksel sınıflarının girdi imgesinin orijinal şekline geri ölçeklenmesini gerektirir. Bu tür yeniden ölçeklendirme, özellikle farklı sınıflara sahip bölümlenmiş bölgeler için yanlış olabilir. Bu sorunu önlemek için, imgeyi yeniden ölçekleme yerine sabit bir şekle kırpıyoruz. Özellikle, imge artırımındaki rasgele kırpmayı kullanarak, girdi imgesinin ve etiketinin aynı alanını keseriz.
#@save
def voc_rand_crop(feature, label, height, width):
"""Hem öznitelik hem de etiket resimlerini rastgele kırpın."""
feature, rect = image.random_crop(feature, (width, height))
label = image.fixed_crop(label, *rect)
return feature, label
imgs = []
for _ in range(n):
imgs += voc_rand_crop(train_features[0], train_labels[0], 200, 300)
d2l.show_images(imgs[::2] + imgs[1::2], 2, n);
#@save
def voc_rand_crop(feature, label, height, width):
"""Hem öznitelik hem de etiket resimlerini rastgele kırpın."""
rect = torchvision.transforms.RandomCrop.get_params(
feature, (height, width))
feature = torchvision.transforms.functional.crop(feature, *rect)
label = torchvision.transforms.functional.crop(label, *rect)
return feature, label
imgs = []
for _ in range(n):
imgs += voc_rand_crop(train_features[0], train_labels[0], 200, 300)
imgs = [img.permute(1, 2, 0) for img in imgs]
d2l.show_images(imgs[::2] + imgs[1::2], 2, n);
13.9.2.2. Özel Anlamsal Bölümleme Veri Kümesi Sınıfı¶
Yüksek düzey API’ler tarafından sağlanan Dataset sınıfını devralarak
özel bir anlamsal bölümleme veri kümesi sınıfı VOCSegDataset’i
tanımlıyoruz. __getitem__ işlevini uygulayarak, veri kümesindeki
idx olarak dizinlenmiş girdi imgesine ve bu imgedeki her pikselin
sınıf dizinine keyfi olarak erişebiliriz. Veri kümelerindeki bazı
imgeler rasgele kırpma çıktı boyutundan daha küçük bir boyuta sahip
olduğundan, bu örnekler özel bir filter işlevi tarafından
filtrelenir. Buna ek olarak, girdi imgelerinin üç RGB kanalının
değerlerini standartlaştırmak için normalize_image işlevini de
tanımlıyoruz.
#@save
class VOCSegDataset(gluon.data.Dataset):
"""VOC veri kümesini yüklemek için özelleştirilmiş bir veri kümesi."""
def __init__(self, is_train, crop_size, voc_dir):
self.rgb_mean = np.array([0.485, 0.456, 0.406])
self.rgb_std = np.array([0.229, 0.224, 0.225])
self.crop_size = crop_size
features, labels = read_voc_images(voc_dir, is_train=is_train)
self.features = [self.normalize_image(feature)
for feature in self.filter(features)]
self.labels = self.filter(labels)
self.colormap2label = voc_colormap2label()
print('read ' + str(len(self.features)) + ' examples')
def normalize_image(self, img):
return (img.astype('float32') / 255 - self.rgb_mean) / self.rgb_std
def filter(self, imgs):
return [img for img in imgs if (
img.shape[0] >= self.crop_size[0] and
img.shape[1] >= self.crop_size[1])]
def __getitem__(self, idx):
feature, label = voc_rand_crop(self.features[idx], self.labels[idx],
*self.crop_size)
return (feature.transpose(2, 0, 1),
voc_label_indices(label, self.colormap2label))
def __len__(self):
return len(self.features)
#@save
class VOCSegDataset(torch.utils.data.Dataset):
"""VOC veri kümesini yüklemek için özelleştirilmiş bir veri kümesi."""
def __init__(self, is_train, crop_size, voc_dir):
self.transform = torchvision.transforms.Normalize(
mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
self.crop_size = crop_size
features, labels = read_voc_images(voc_dir, is_train=is_train)
self.features = [self.normalize_image(feature)
for feature in self.filter(features)]
self.labels = self.filter(labels)
self.colormap2label = voc_colormap2label()
print('read ' + str(len(self.features)) + ' examples')
def normalize_image(self, img):
return self.transform(img.float() / 255)
def filter(self, imgs):
return [img for img in imgs if (
img.shape[1] >= self.crop_size[0] and
img.shape[2] >= self.crop_size[1])]
def __getitem__(self, idx):
feature, label = voc_rand_crop(self.features[idx], self.labels[idx],
*self.crop_size)
return (feature, voc_label_indices(label, self.colormap2label))
def __len__(self):
return len(self.features)
13.9.2.3. Veri Kümesini Okuma¶
Eğitim kümesinin ve test kümesinin örneklerini oluşturmak için özel
VOCSegDataset sınıfını kullanıyoruz. Rastgele kırpılmış imgelerin
çıktı şeklinin \(320\times 480\) olduğunu belirttiğimizi varsayalım.
Aşağıda, eğitim kümesinde ve test kümesinde tutulan örneklerin sayısını
görebiliriz.
crop_size = (320, 480)
voc_train = VOCSegDataset(True, crop_size, voc_dir)
voc_test = VOCSegDataset(False, crop_size, voc_dir)
read 1114 examples
read 1078 examples
crop_size = (320, 480)
voc_train = VOCSegDataset(True, crop_size, voc_dir)
voc_test = VOCSegDataset(False, crop_size, voc_dir)
read 1114 examples
read 1078 examples
Toplu iş boyutunu 64 olarak ayarlarken, eğitim kümesi için veri yineleyicisini tanımlarız. İlk minigrup şeklini yazdıralım. İmge sınıflandırması veya nesne algılamasından farklı olarak, buradaki etiketler üç boyutlu tensörlerdir.
batch_size = 64
train_iter = gluon.data.DataLoader(voc_train, batch_size, shuffle=True,
last_batch='discard',
num_workers=d2l.get_dataloader_workers())
for X, Y in train_iter:
print(X.shape)
print(Y.shape)
break
(64, 3, 320, 480)
(64, 320, 480)
batch_size = 64
train_iter = torch.utils.data.DataLoader(voc_train, batch_size, shuffle=True,
drop_last=True,
num_workers=d2l.get_dataloader_workers())
for X, Y in train_iter:
print(X.shape)
print(Y.shape)
break
torch.Size([64, 3, 320, 480])
torch.Size([64, 320, 480])
13.9.2.4. Her Şeyi Biraraya Koyma¶
Son olarak, Pascal VOC2012 anlamsal bölümleme veri kümesini indirmek ve
okumak için aşağıdaki load_data_voc işlevini tanımlıyoruz. Hem
eğitim hem de test veri kümeleri için veri yineleyicilerini döndürür.
#@save
def load_data_voc(batch_size, crop_size):
"""Load the VOC semantic segmentation dataset."""
voc_dir = d2l.download_extract('voc2012', os.path.join(
'VOCdevkit', 'VOC2012'))
num_workers = d2l.get_dataloader_workers()
train_iter = gluon.data.DataLoader(
VOCSegDataset(True, crop_size, voc_dir), batch_size,
shuffle=True, last_batch='discard', num_workers=num_workers)
test_iter = gluon.data.DataLoader(
VOCSegDataset(False, crop_size, voc_dir), batch_size,
last_batch='discard', num_workers=num_workers)
return train_iter, test_iter
#@save
def load_data_voc(batch_size, crop_size):
"""Load the VOC semantic segmentation dataset."""
voc_dir = d2l.download_extract('voc2012', os.path.join(
'VOCdevkit', 'VOC2012'))
num_workers = d2l.get_dataloader_workers()
train_iter = torch.utils.data.DataLoader(
VOCSegDataset(True, crop_size, voc_dir), batch_size,
shuffle=True, drop_last=True, num_workers=num_workers)
test_iter = torch.utils.data.DataLoader(
VOCSegDataset(False, crop_size, voc_dir), batch_size,
drop_last=True, num_workers=num_workers)
return train_iter, test_iter
13.9.3. Özet¶
Anlamsal bölümleme, imgeyi farklı anlamsal sınıflara ait bölgelere bölerek piksel düzeyinde bir imgede ne olduğunu tanır ve anlar.
En önemli anlamsal bölümleme veri kümesi Pascal VOC2012’dir.
Anlamsal bölümlemede, girdi imgesi ve etiketi piksel üzerinde bire bir karşılık geldiğinden, girdi imgesi yeniden ölçeklenmek yerine rastgele sabit bir şekle kırpılır.
13.9.4. Alıştırmalar¶
Otonom araçlarda ve tıbbi imge teşhislerinde anlamsal bölümleme nasıl uygulanabilir? Başka uygulamalar düşünebiliyor musun?
Section 13.1 içindeki veri artırımı açıklamalarını hatırlayın. İmge sınıflandırmasında kullanılan imge artırma yöntemlerinden hangisinin anlamsal bölümlemede uygulanması mümkün olmayacaktır?