7.1. Derin Evrişimli Sinir Ağları (AlexNet)¶ Open the notebook in SageMaker Studio Lab
CNN’ler LeNet’in ortaya çıkışını takiben bilgisayarla görme ve makine öğrenmesi topluluklarında iyi bilinse de, alanda hemen baskın olmadılar. LeNet, ilk küçük veri kümelerinde iyi sonuçlar elde etse de, CNN’leri daha büyük, daha gerçekçi veri kümeleri üzerinde eğitmenin başarımı ve uygulanabilirliği henüz belirlenmemişti. Aslında, 1990’ların başları ile 2012 yılının dönüm noktası sonuçları ortasındaki ara dönemin büyük bir bölümünde, sinir ağları genellikle destek vektör makineleri gibi diğer makine öğrenmesi yöntemleri tarafından aşıldı.
Bilgisayarla görme için, bu karşılaştırma belki de adil değildir. Bu, evrişimli ağlara girdiler ham veya hafif işlenmiş (örneğin, merkeze çekme yoluyla) piksel değerlerinden oluşsa da, uygulayıcılar asla ham pikselleri geleneksel modellere beslemezlerdi. Bunun yerine, tipik bilgisayarla görmedeki işlem hatları, manuel tasarlanmış öznitelik çıkarma işlem hatlarından oluşuyordu. Öznitelikleri öğrenmektense, öznitelikler hazırlanırdı. İlerlemenin çoğu, öznitelikler için daha akıllı fikirlere sahip olunmasından gelirdi ve öğrenme algoritması genellikle sonradan düşünülürdü.
Bazı sinir ağı hızlandırıcıları 1990’larda da mevcut olmasına rağmen, çok sayıda parametreyle derin çok kanallı, çok katmanlı CNN’ler yapmak için henüz yeterince güçlü değillerdi. Dahası, veri kümeleri hala nispeten küçüktü. Bu engellere ek olarak, parametre ilkleme sezgisel yöntemleri, rasgele eğim inişin akıllı biçimleri, daralmayan etkinleştirme fonksiyonları ve etkili düzenlileştirme teknikleri de dahil olmak üzere sinir ağlarını eğitmek için anahtar püf noktaları hala eksikti.
Böylece, uçtan uça (pikselden sınıflandırmaya) sistemleri eğitmekten ziyade, klasik işlem hatları daha çok şöyle görünüyordu:
İlginç bir veri kümesi elde edin. İlk günlerde, bu veri kümeleri pahalı sensörlere ihtiyaç duyuyordu (o zamanlarda 1 megapiksel imgeler son teknolojiydi).
Veri kümesini, optik, geometri, diğer analitik araçlar ve bazen şanslı lisansüstü öğrencilerin rastlantısal keşiflerine dayanan elle hazırlanmış özniteliklerle ön işleyin.
Verileri SIFT (ölçek-değişmez öznitelik dönüşümü) (Lowe, 2004), SURF (hızlandırılmış gürbüz öznitelikler) (Bay et al., 2006) veya herhangi bir sayıda diğer elle ayarlanmış işlem hatları gibi standart öznitelik çıkarıcılar kümesine besleyin.
Bir sınıflandırıcı eğitmek için ortaya çıkan temsilleri en sevdiğiniz sınıflandırıcıya (muhtemelen doğrusal bir model veya çekirdek yöntemi) boşaltın.
Makine öğrenmesi araştırmacılarıyla konuştuysanız, makine öğrenmesinin hem önemli hem de güzel olduğuna inanırlardı. Zarif teoriler çeşitli sınıflandırıcıların özelliklerini kanıtladı. Makine öğrenmesi alanı gelişen, titiz ve son derece yararlıydı. Ancak, bir bilgisayarla görme araştırmacısı ile konuştuysanız, çok farklı bir hikaye duyardınız. İmge tanımanın kirli gerçeğini size söylerlerdi; öğrenme algoritmaları değil, öznitelikler ilerlemeyi yönlendirir. Bilgisayarla görme araştırmacıları haklı olarak, biraz daha büyük veya daha temiz bir veri kümesinin veya biraz geliştirilmiş öznitelik çıkarma işlem hattının nihai doğruluk oranı için herhangi bir öğrenme algoritmasından çok daha önemli olduğuna inanıyordu.
7.1.1. Temsilleri Öğrenme¶
Vaziyeti ortaya dökmenin bir diğer yolu da işlem hattının en önemli kısmının temsil olmasıdır. 2012 yılına kadar temsil mekanik olarak hesaplanırdı. Aslında, yeni bir öznitelik fonksiyonu kümesi işleme, sonuçları iyileştirme ve yöntemi yazma belirgin bir makale türüydü. SIFT (Lowe, 2004), SURF (Bay et al., 2006), HOG (yönlendirilmiş gradyan histogramları) (Dalal and Triggs, 2005), görsel sözcük torbası ve benzeri öznitelik çıkarıcılar ortamın hakimiydi.
Yann LeCun, Geoff Hinton, Yoshua Bengio, Andrew Ng, Shun-ichi Amari ve Juergen Schmidhuber de dahil olmak üzere bir başka araştırmacı grubunun farklı planları vardı. Onlar özniteliklerin kendilerinin öğrenilmesi gerektiğine inanıyordu. Dahası, makul derecede karmaşık olması için, özniteliklerin hiyerarşik olarak, her biri öğrenilebilir parametrelere sahip birden çok ortak öğrenilen katmanla oluşması gerektiğine inanıyorlardı. İmge durumunda, en alt katmanlar kenarları, renkleri ve dokuları algılayabilir. Gerçekten de, Alex Krizhevsky, Ilya Sutskever ve Geoff Hinton, yeni bir CNN biçimini, AlexNeti, önerdi ve o 2012 ImageNet yarışmasında mükemmel bir performans elde etti. AlexNet, atılım yapan ImageNet sınıflandırma makalesinin (Krizhevsky et al., 2012) ilk yazarı olan Alex Krizhevsky’nin adını aldı.
İlginçtir ki, ağın en düşük katmanlarında, model bazı geleneksel filtrelere benzeyen öznitelik çıkarıcıları öğrendi. Şekil Fig. 7.1.1, AlexNet (Krizhevsky et al., 2012) makalesinden tekrar üretilmiştir ve alt düzey imge tanımlayıcılarını göstermektedir.
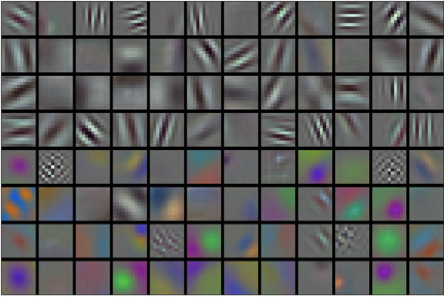
Fig. 7.1.1 AlexNet’in ilk katmanındaki öğrenilmiş imgeler¶
Ağdaki daha üst katmanlar, gözler, burunlar, çimen çizgileri vb. gibi daha büyük yapıları temsil edecek şekilde bu temsillerin üzerine inşa edilebilir. Daha üst katmanlar bile insanlar, uçaklar, köpekler veya frizbi gibi tüm nesneleri temsil edebilir. Nihayetinde, son gizli durum, farklı kategorilere ait verilerin kolayca ayrılabilmesi için içeriğini özetleyen imgenin sıkıştırılmış bir temsilini öğrenir.
Çok katmanlı CNN’ler için nihai atılım 2012’de gelirken, çekirdek bir grup araştırmacı, uzun yıllar görsel verilerin hiyerarşik temsillerini öğrenmeye çalışarak kendilerini bu fikre adamıştı. 2012’deki nihai atılım iki temel faktöre bağlanabilir.
7.1.1.1. Eksik Malzeme: Veri¶
Birçok katmana sahip derin modeller, dışbükey optimizasyonlara (örneğin doğrusal ve çekirdek yöntemleri) dayalı geleneksel yöntemlerden önemli ölçüde daha iyi performans gösterdikleri düzene girmek için büyük miktarda veri gerektirirler. Bununla birlikte, bilgisayarların sınırlı depolama kapasitesi, sensörlerin göreceli pahalı fiyatları ve 1990’lardaki nispeten daha kısıtlı araştırma bütçeleri göz önüne alındığında, çoğu araştırma küçük veri kümelerine dayanıyordu. Çok sayıda makale, UCI veri kümelerinin koleksiyonuna değiniyordi, bunların birçoğu düşük çözünürlükte doğal olmayan ortamlarda çekilmiş sadece yüzlerce veya (birkaç) binlerce imge içeriyordu.
2009’da ImageNet veri kümesi yayımlandı ve araştırmacıları 1000 farklı nesne kategorisinden her biri farklı 1000 eleman içeren toplamda 1 milyon örnek ile modeller öğrenmeye zorladı. Bu veri kümesini tanıtan Fei-Fei Li liderliğindeki araştırmacılar, her kategori için büyük aday kümelerini ön filtrelemek için Google Image Search kullandı ve her imgenin ilgili kategoriye ait olup olmadığını onaylatmak için Amazon Mechanical Turk kitle kaynak kullanımı işlem hattını kullandı. Bu eşi görülmemiş bir ölçekti. ImageNet yarışması olarak adlandırılan ilgili rekabet, bilgisayarla görme ve makine öğrenmesi araştırmalarını ileriye sürdü, araştırmacıları hangi modellerin daha önce akademisyenlerin düşündüklerinden daha büyük bir ölçekte en iyi performans gösterdiğini belirlemeye zorladı.
7.1.1.2. Eksik Malzeme: Donanım¶
Derin öğrenme modelleri, bilgi işlem döngülerinin doymak bilmeyen tüketicileridir. Eğitim yüzlerce dönem alabilir ve her yineleme, veriyi hesaplamalı olarak pahalı doğrusal cebir işlemlerine sahip birçok katmanından geçirmeyi gerektirir. Bu, 1990’ların ve 2000’lerin başında, daha verimli bir şekilde optimize edilmiş dışbükey amaç fonksiyonlarına dayanan basit algoritmaların tercih edilmesinin başlıca nedenlerinden biridir.
Grafik işleme birimleri (GPU’lar) derin öğrenmeyi mümkün kılmada bir oyun değiştirici olduğu kanıtladı. Bu yongalar uzun zamandan öncesinden bilgisayar oyunlarında faydalanmak için grafik işlemeyi hızlandırmak amacıyla geliştirilmişti. Özellikle, birçok bilgisayar grafik görevinde gerekli olan yüksek verim \(4 \times 4\) matris vektör çarpımları için optimize edilmişlerdir. Neyse ki, buradaki matematik, evrişimli katmanları hesaplamak için gerekli olana çarpıcı bir şekilde benzer. Bu süre zarfında NVIDIA ve ATI, GPU’ları genel hesaplama işlemleri için optimize etmeye ve bunları genel amaçlı GPU’lar (GPGPU) olarak pazarlamaya başlamıştı.
Biraz sezgi sağlamak için, modern bir mikroişlemcinin (CPU) çekirdeklerini göz önünde bulundurun. Çekirdeklerin her biri, yüksek bir saat frekansı ve gösterişli büyük önbellekleri (birkaç megabayta kadar L3) ile oldukça güçlü çalışır. Her çekirdek, dallanma tahmincileri, derin bir işlem hattı ve çok çeşitli programları çalıştırmasını sağlayan diğer çekici ek özellikleri ile birlikte birçok çeşitli talimatı uygulamak için çok uygundur. Bununla birlikte, bu belirgin güç aynı zamanda Aşil topuğudur: Genel amaçlı çekirdekler inşa etmek çok pahalıdır. Çok sayıda yonga alanı, karmaşık bir destek yapısı (bellek arabirimleri, çekirdekler arasında önbelleğe alma mantığı, yüksek hızlı ara bağlantılar vb.) gerektirirler ve herhangi bir özel görevde nispeten kötüdürler. Modern dizüstü bilgisayarlar 4 adede kadar çekirdeğe sahiptir ve hatta üst düzey sunucular bile 64 çekirdeği nadiren aşmaktadır, çünkü uygun maliyetli değildir.
Karşılaştırma olarak, GPU’lar \(100 \sim 1000\) arasında küçük işleme elemanlarından oluşur (ayrıntılar NVIDIA, ATI, ARM ve diğer yonga satıcıları arasında biraz farklılık gösterir), genellikle daha büyük gruplar halinde gruplandırılır (NVIDIA bunları bükülme (warp) olarak adlandırır). Her çekirdek nispeten zayıfken, bazen 1GHz altı saat frekansında bile olsa, GPU’ların büyüklük mertebesini CPU’lardan daha hızlı hale getiren bu tür çekirdeklerin toplam sayısıdır. Örneğin, NVIDIA’nın yeni Volta nesli, özel talimatlar için çip başına 120 TFlop (ve daha genel amaçlı olanlar için 24 TFlop’a kadar) sunarken, CPU’ların kayan virgüllü sayı performansı bugüne kadar 1 TFlop’u aşmadı. Bunun mümkün olmasının nedeni aslında oldukça basittir: Birincisi, güç tüketimi saat frekansı ile dört kat büyümeye eğilimlidir. Bu nedenle, 4 kat daha hızlı çalışan bir CPU çekirdeğinin güç bütçesi ile (tipik bir sayı), \(1/4\) hızında 16 GPU çekirdeğini kullanabilirsiniz, bu da performansın \(16 \times 1/4 = 4\) katını verir. Ayrıca, GPU çekirdekleri çok daha basittir (aslında, uzun bir süre için genel amaçlı kod yürütebilir bile değillerdi), bu da onları daha verimli kılar. Son olarak, derin öğrenmede birçok işlem yüksek bellek bant genişliği gerektirir. Yine, GPU’lar burada en az 10 kat daha geniş olan veriyolları ile parlıyor.
2012’ye geri dönelim. Alex Krizhevsky ve Ilya Sutskever GPU donanımı üzerinde çalışabilecek derin bir CNN uyguladığında büyük bir atılım oldu. CNN’lerdeki hesaplamalı darboğazların, evrişimlerin ve matris çarpımlarının, tümünün donanımda paralelleştirilebilecek işlemler olduğunu fark ettiler. 3GB belleğe sahip iki NVIDIA GTX 580s kullanarak hızlı evrişimler uyguladılar. cuda-convnet kodu o kadar iyiydi ki birkaç yıl endüstri standardı oldu ve derin öğrenmenin patladığı ilk birkaç yılın itici gücü oldu.
7.1.2. AlexNet¶
8 katmanlı CNN kullanan AlexNet, 2012 ImageNet Büyük Ölçekli Görsel Tanıma Yarışması’nı olağanüstü derecede büyük bir farkla kazandı. Bu ağ, ilk kez, öğrenme yoluyla elde edilen özniteliklerin el ile tasarlanmış öznitelikleri aşabildiğini ve bilgisayarla görmede önceki alışılmış kalıpları kırabileceğini gösterdi.
Fig. 7.1.2 içinde gösterildiği gibi AlexNet ve LeNet’in mimarileri çok benzerdir. Modelin iki küçük GPU’ya uyması için 2012’de gerekli olan tasarım tuhaflıklarından bazılarını kaldırarak AlexNet’in biraz aerodinamik bir versiyonunu sunduğumuza dikkat edin.

Fig. 7.1.2 LeNet’ten (sol) AlexNet’e (sağ).¶
AlexNet ve LeNet’in tasarım felsefeleri çok benzer, ancak önemli farklılıklar da vardır. İlk olarak, AlexNet nispeten küçük LeNet5’ten çok daha derindir. AlexNet sekiz katmandan oluşur: Beş evrişimli katman, iki tam bağlı gizli katman ve bir tam bağlı çıktı katmanı. İkincisi, AlexNet etkinleştirme fonksiyonu olarak sigmoid yerine ReLU’yu kullandı. Aşağıda ayrıntıları daha derin inceleyelim.
7.1.2.1. Mimari¶
AlexNet’in ilk katmanında, evrişim penceresinin şekli \(11\times11\)’dir. ImageNet’teki çoğu imge MNIST imgelerinden on kat daha yüksek ve daha geniş olduğundan, ImageNet verilerindeki nesneler daha fazla piksel kaplama eğilimindedir. Sonuç olarak, nesneyi anlamak için daha büyük bir evrişim penceresi gereklidir. İkinci kattaki evrişim pencere şekli \(5\times5\)’e, ardından \(3\times3\)’e indirgenir. Buna ek olarak, birinci, ikinci ve beşinci kıvrımsal katmanlardan sonra, ağ \(3\times3\) pencere şekli ve 2’lik bir uzun adım ile maksimum ortaklama katmanları ekler. Ayrıca, AlexNet’in LeNet’ten on kat daha fazla evrişim kanalı vardır.
Son evrişimli tabakadan sonra 4096 çıktılı iki tam bağlı katman vardır. Bu iki büyük tam bağlı katman, yaklaşık 1 GB’lık model parametresi üretir. İlk GPU’lardaki sınırlı bellek nedeniyle, orijinal AlexNet çift veri akışı tasarımı kullandı, böylece iki GPU’larının her biri modelin yalnızca yarısını depolamaktan ve hesaplamaktan sorumlu olabilirdi. Neyse ki, GPU belleği artık nispeten bol, bu yüzden nadiren GPU’lar arasında modelleri parçalamamız gerekiyor (AlexNet modeli versiyonumuz bu açıdan orijinal makaleden sapıyor).
7.1.2.2. Etkinleştirme İşlevleri¶
Ayrıca, AlexNet sigmoid etkinleştirme işlevini daha basit bir ReLU etkinleştirme fonksiyonu ile değiştirdi. Bir yandan, ReLU etkinleştirme işlevinin hesaplanması daha kolaydır. Örneğin, sigmoid etkinleştirme işlevinde bulunan üst alma işlemi yoktur. Öte yandan, ReLU etkinleştirme işlevi, farklı parametre ilkleme yöntemleri kullanıldığında model eğitimini kolaylaştırır. Bunun nedeni, sigmoid etkinleştirme işlevinin çıktısı 0 veya 1’e çok yakın olduğunda, bu bölgelerin gradyanının neredeyse 0 olmasıdır, böylece geri yayma model parametrelerinin bazılarını güncelleştirmeye devam edemez. Buna karşılık, pozitif aralıktaki ReLU etkinleştirme işlevinin gradyanı her zaman 1’dir. Bu nedenle, model parametreleri düzgün ilklenmezse, sigmoid işlevi pozitif aralıkta neredeyse 0 gradyan elde edebilir, böylece model etkili bir şekilde eğitilemez.
7.1.2.3. Kapasite Kontrolü ve Ön İşleme¶
AlexNet, tam bağlı katmanın model karmaşıklığını hattan düşürme (dropout) ile (Section 4.6) kontrol ederken, LeNet sadece ağırlık sönümlemesini kullanır. Verileri daha da zenginleştirme için AlexNet’in eğitim döngüsü, ters çevirme, kırpma ve renk değişiklikleri gibi çok fazla imge zenginleştirme ekledi. Bu, modeli daha gürbüz hale getirir ve daha büyük örneklem boyutu aşırı öğrenmeyi etkili bir şekilde azaltır. Veri zenginleştirme işlemlerini Section 13.1 içinde daha ayrıntılı olarak tartışacağız.
from d2l import mxnet as d2l
from mxnet import np, npx
from mxnet.gluon import nn
npx.set_np()
net = nn.Sequential()
# Burada nesneleri yakalamak için daha büyük bir 11 x 11'lik pencere kullanıyoruz.
# Aynı zamanda, çıktının yüksekliğini ve genişliğini büyük ölçüde azaltmak
# için 4'lük bir uzun adım kullanıyoruz. Burada, çıktı kanallarının sayısı
# LeNet'tekinden çok daha fazladır.
net.add(nn.Conv2D(96, kernel_size=11, strides=4, activation='relu'),
nn.MaxPool2D(pool_size=3, strides=2),
# Evrişim penceresini küçült, girdi ve çıktı boyunca tutarlı yükseklik
# ve genişlik için dolguyu 2'ye ayarlayın ve çıktı kanallarının sayısını artırın
nn.Conv2D(256, kernel_size=5, padding=2, activation='relu'),
nn.MaxPool2D(pool_size=3, strides=2),
# Ardışık üç evrişim katmanı ve daha küçük bir evrişim penceresi kullan.
# Son evrişim katmanı dışında, çıktı kanallarının sayısı daha da artırılır.
# Ortaklama katmanları, ilk iki evrişim katmanından sonra girdinin
# yüksekliğini ve genişliğini azaltmak için kullanılmaz.
nn.Conv2D(384, kernel_size=3, padding=1, activation='relu'),
nn.Conv2D(384, kernel_size=3, padding=1, activation='relu'),
nn.Conv2D(256, kernel_size=3, padding=1, activation='relu'),
nn.MaxPool2D(pool_size=3, strides=2),
# Burada, tam bağlı katmanın çıktı sayısı, LeNet'tekinden birkaç kat
# daha fazladır. Aşırı öğrenmeyi azaltmak için hattan düşürme katmanını kullan
nn.Dense(4096, activation='relu'), nn.Dropout(0.5),
nn.Dense(4096, activation='relu'), nn.Dropout(0.5),
# Çıktı katmanı. Fashion-MNIST kullandığımız için sınıf sayısı
# makaledeki gibi 1000 yerine 10'dur.
nn.Dense(10))
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
# Burada nesneleri yakalamak için daha büyük bir 11 x 11'lik pencere kullanıyoruz.
# Aynı zamanda, çıktının yüksekliğini ve genişliğini büyük ölçüde azaltmak
# için 4'lük bir uzun adım kullanıyoruz. Burada, çıktı kanallarının sayısı
# LeNet'tekinden çok daha fazladır.
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# Evrişim penceresini küçült, girdi ve çıktı boyunca tutarlı yükseklik
# ve genişlik için dolguyu 2'ye ayarlayın ve çıktı kanallarının sayısını artırın
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# Ardışık üç evrişim katmanı ve daha küçük bir evrişim penceresi kullan.
# Son evrişim katmanı dışında, çıktı kanallarının sayısı daha da artırılır.
# Ortaklama katmanları, ilk iki evrişim katmanından sonra girdinin
# yüksekliğini ve genişliğini azaltmak için kullanılmaz.
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
# Burada, tam bağlı katmanın çıktı sayısı, LeNet'tekinden birkaç kat
# daha fazladır. Aşırı öğrenmeyi azaltmak için hattan düşürme katmanını kullan
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# Çıktı katmanı. Fashion-MNIST kullandığımız için sınıf sayısı
# makaledeki gibi 1000 yerine 10'dur.
nn.Linear(4096, 10))
import tensorflow as tf
from d2l import tensorflow as d2l
def net():
return tf.keras.models.Sequential([
# Burada nesneleri yakalamak için daha büyük bir 11 x 11'lik pencere kullanıyoruz.
# Aynı zamanda, çıktının yüksekliğini ve genişliğini büyük ölçüde azaltmak
# için 4'lük bir uzun adım kullanıyoruz. Burada, çıktı kanallarının sayısı
# LeNet'tekinden çok daha fazladır.
tf.keras.layers.Conv2D(filters=96, kernel_size=11, strides=4,
activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
# Evrişim penceresini küçült, girdi ve çıktı boyunca tutarlı yükseklik
# ve genişlik için dolguyu 2'ye ayarlayın ve çıktı kanallarının sayısını artırın
tf.keras.layers.Conv2D(filters=256, kernel_size=5, padding='same',
activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
# Ardışık üç evrişim katmanı ve daha küçük bir evrişim penceresi kullan.
# Son evrişim katmanı dışında, çıktı kanallarının sayısı daha da artırılır.
# Ortaklama katmanları, ilk iki evrişim katmanından sonra girdinin
# yüksekliğini ve genişliğini azaltmak için kullanılmaz.
tf.keras.layers.Conv2D(filters=384, kernel_size=3, padding='same',
activation='relu'),
tf.keras.layers.Conv2D(filters=384, kernel_size=3, padding='same',
activation='relu'),
tf.keras.layers.Conv2D(filters=256, kernel_size=3, padding='same',
activation='relu'),
tf.keras.layers.MaxPool2D(pool_size=3, strides=2),
tf.keras.layers.Flatten(),
# Burada, tam bağlı katmanın çıktı sayısı, LeNet'tekinden birkaç kat
# daha fazladır. Aşırı öğrenmeyi azaltmak için hattan düşürme katmanını kullan
tf.keras.layers.Dense(4096, activation='relu'),
tf.keras.layers.Dropout(0.5),
tf.keras.layers.Dense(4096, activation='relu'),
tf.keras.layers.Dropout(0.5),
# Çıktı katmanı. Fashion-MNIST kullandığımız için sınıf sayısı
# makaledeki gibi 1000 yerine 10'dur.
tf.keras.layers.Dense(10)
])
Her katmanın çıktı şeklini gözlemlemek için 224 yüksekliğinde ve genişliğinde tek kanallı bir veri örneği oluşturuyoruz. Fig. 7.1.2 içindeki AlexNet mimarisine uyuyor.
X = np.random.uniform(size=(1, 1, 224, 224))
net.initialize()
for layer in net:
X = layer(X)
print(layer.name, 'cikli sekli:\t', X.shape)
conv0 cikli sekli: (1, 96, 54, 54)
pool0 cikli sekli: (1, 96, 26, 26)
conv1 cikli sekli: (1, 256, 26, 26)
pool1 cikli sekli: (1, 256, 12, 12)
conv2 cikli sekli: (1, 384, 12, 12)
conv3 cikli sekli: (1, 384, 12, 12)
conv4 cikli sekli: (1, 256, 12, 12)
pool2 cikli sekli: (1, 256, 5, 5)
dense0 cikli sekli: (1, 4096)
dropout0 cikli sekli: (1, 4096)
dense1 cikli sekli: (1, 4096)
dropout1 cikli sekli: (1, 4096)
dense2 cikli sekli: (1, 10)
X = torch.randn(1, 1, 224, 224)
for layer in net:
X=layer(X)
print(layer.__class__.__name__,'cikli sekli:\t',X.shape)
Conv2d cikli sekli: torch.Size([1, 96, 54, 54])
ReLU cikli sekli: torch.Size([1, 96, 54, 54])
MaxPool2d cikli sekli: torch.Size([1, 96, 26, 26])
Conv2d cikli sekli: torch.Size([1, 256, 26, 26])
ReLU cikli sekli: torch.Size([1, 256, 26, 26])
MaxPool2d cikli sekli: torch.Size([1, 256, 12, 12])
Conv2d cikli sekli: torch.Size([1, 384, 12, 12])
ReLU cikli sekli: torch.Size([1, 384, 12, 12])
Conv2d cikli sekli: torch.Size([1, 384, 12, 12])
ReLU cikli sekli: torch.Size([1, 384, 12, 12])
Conv2d cikli sekli: torch.Size([1, 256, 12, 12])
ReLU cikli sekli: torch.Size([1, 256, 12, 12])
MaxPool2d cikli sekli: torch.Size([1, 256, 5, 5])
Flatten cikli sekli: torch.Size([1, 6400])
Linear cikli sekli: torch.Size([1, 4096])
ReLU cikli sekli: torch.Size([1, 4096])
Dropout cikli sekli: torch.Size([1, 4096])
Linear cikli sekli: torch.Size([1, 4096])
ReLU cikli sekli: torch.Size([1, 4096])
Dropout cikli sekli: torch.Size([1, 4096])
Linear cikli sekli: torch.Size([1, 10])
X = tf.random.uniform((1, 224, 224, 1))
for layer in net().layers:
X = layer(X)
print(layer.__class__.__name__, 'cikli sekli:\t', X.shape)
Conv2D cikli sekli: (1, 54, 54, 96)
MaxPooling2D cikli sekli: (1, 26, 26, 96)
Conv2D cikli sekli: (1, 26, 26, 256)
MaxPooling2D cikli sekli: (1, 12, 12, 256)
Conv2D cikli sekli: (1, 12, 12, 384)
Conv2D cikli sekli: (1, 12, 12, 384)
Conv2D cikli sekli: (1, 12, 12, 256)
MaxPooling2D cikli sekli: (1, 5, 5, 256)
Flatten cikli sekli: (1, 6400)
Dense cikli sekli: (1, 4096)
Dropout cikli sekli: (1, 4096)
Dense cikli sekli: (1, 4096)
Dropout cikli sekli: (1, 4096)
Dense cikli sekli: (1, 10)
7.1.3. Veri Kümesini Okuma¶
AlexNet makalede ImageNet üzerinde eğitilmiş olsa da, bir ImageNet
modelinin yakınsaması modern bir GPU’da bile saatler veya günler
sürebileceğinden, burada Fashion-MNIST veri kümesini kullanıyoruz.
AlexNet’in doğrudan Fashion-MNIST üzerine uygulanmasıyla ilgili
sorunlardan biri, imgelerinin ImageNet imgelerinden daha düşük
çözünürlüğe (\(28 \times 28\) piksel) sahip olmasıdır. İşleri
yürütebilmek için onları \(224 \times 224\)’ye yükseltiyoruz
(genellikle akıllı bir uygulama değil, ama burada AlexNet mimarisine
sadık olmak için yapıyoruz). Bu yeniden boyutlandırmayı resize
bağımsız değişkeni ile d2l.load_data_fashion_mnist işlevinde
gerçekleştiriyoruz.
batch_size = 128
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
7.1.4. Eğitim¶
Şimdi AlexNet’i eğitmeye başlayabiliriz. Section 6.6 içindeki LeNet ile karşılaştırıldığında, buradaki ana değişiklik, daha derin ve daha geniş ağ, daha yüksek imge çözünürlüğü ve daha maliyetli evrişimler nedeniyle daha küçük bir öğrenme hızı ve çok daha yavaş eğitim kullanılmasıdır.
lr, num_epochs = 0.01, 10
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
loss 0.331, train acc 0.879, test acc 0.881
4067.6 examples/sec on gpu(0)

lr, num_epochs = 0.01, 10
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
loss 0.330, train acc 0.879, test acc 0.881
4092.1 examples/sec on cuda:0

lr, num_epochs = 0.01, 10
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
loss 0.332, train acc 0.878, test acc 0.878
5002.9 examples/sec on /GPU:0
<keras.engine.sequential.Sequential at 0x7fd8181b4f40>

7.1.5. Özet¶
AlexNet, LeNet’e benzer bir yapıya sahiptir, ancak büyük ölçekli ImageNet veri kümesine uyacak şekilde daha fazla evrişimli katman ve daha büyük bir parametre uzayı kullanır.
Bugün AlexNet çok daha etkili mimariler tarafından aşıldı, ancak sığ ağlardan günümüzde kullanılan derin ağlara doğru önemli bir adımdır.
AlexNet’in uygulamasının LeNet’ten sadece birkaç satır daha fazlası var gibi görünse de, akademik cemiyetin bu kavramsal değişimi benimsemesi ve onun mükemmel deneysel sonuçlarından yararlanması uzun yıllar aldı. Bu aynı zamanda verimli hesaplama araçlarının eksikliğinden kaynaklanıyordu.
Hattan düşürme, ReLU ve ön işleme, bilgisayarla görme görevlerinde mükemmel performans elde etmek için diğer önemli adımlardı.
7.1.6. Alıştırmalar¶
Dönemlerin sayısını artırmayı deneyin. LeNet ile karşılaştırıldığında, sonuçlar nasıl farklıdır? Neden?
AlexNet Fashion-MNIST veri kümesi için çok karmaşık olabilir.
Doğruluğun önemli ölçüde düşmediğinden emin olurken, eğitimi daha hızlı yapmak için modeli basitleştirmeyi deneyin.
Doğrudan \(28 \times 28\) imgelerde çalışan daha iyi bir model tasarlayın.
Minigrup boyutunu değiştirin ve doğruluk ve GPU belleğindeki değişiklikleri gözlemleyin.
AlexNet’in hesaplama performansını analiz edin.
AlexNet’in bellek ayak izinin baskın kısım nedir?
AlexNet’te hesaplama için baskın kısım nedir?
Sonuçları hesaplarken bellek bant genişliğinin etkisi ne olabilir?
LeNet-5’e hattan düşürme ve ReLU uygulayın. İyileşiyor mu? Ön işlemenin etkisi ne olabilir?